![]()

ABX00087 UNO R4 WiFi մշակման տախտակ
Cricket Shot Recognition using Arduino UNO R4 WiFi + ADXL345 + Edge
Իմպուլս
This document provides a complete workflow for building a cricket shot recognition system using Arduino UNO R4 WiFi with an ADXL345 accelerometer and Edge Impulse Studio. The project involves collecting accelerometer data, training a machine learning model, and deploying the trained model back to the Arduino for real-time shot classification.
Cricket shots considered in this project:
– Cover Drive
– Straight Drive
– Pull Shot
Քայլ 1. Սարքավորումների պահանջներ
– Arduino UNO R4 WiFi
– ADXL345 Accelerometer (I2C)
– Jumper wires
– Breadboard (optional)
- USB Type-C մալուխ
Քայլ 2. Ծրագրային ապահովման պահանջներ
– Arduino IDE (latest)
– Edge Impulse Studio account (free)
– Edge Impulse CLI tools (Node.js required)
– Adafruit ADXL345 library
Step 3: Wiring the ADXL345
Connect the ADXL345 sensor to the Arduino UNO R4 WiFi as follows:
VCC → 3.3V
GND → GND
SDA → SDA (A4)
SCL → SCL (A5)
CS → 3.3V (optional, for I2C mode)
SDO → floating or GND
Step 4: Make IDE Sensor Ready
Ինչպե՞ս տեղադրել սենսորային գրադարաններ Arduino IDE-ում։
Բացեք Arduino IDE-ն
Open Tools → Manage Libraries… and install: Adafruit ADXL345 Unified Adafruit Unified Sensor
(If you have LSM6DSO or MPU6050 instead: install SparkFun LSM6DSO , Adafruit LSM6DS or MPU6050 accordingly.)
Step 5: Arduino Sketch for Data Collection
Upload this sketch to your Arduino UNO R4 WiFi. It streams accelerometer data in CSV format (x,y,z) at ~18 Hz for Edge Impulse.
#ներառել
#include <Adafruit_ADXL345_U.h>
Adafruit_ADXL345_Unified accel =
Adafruit_ADXL345_Unified(12345);
void setup() {
Serial.begin (115200);
if (!accel.begin()) {
Serial.println(“No ADXL345 detected”);
մինչդեռ (1);
}
accel.setRange(ADXL345_RANGE_4_G);
}
void loop() {
sensors_event_t e;
accel.getEvent(&e);
Serial.print (e.acceleration.x);
Serial.print(“,”);
Serial.print(e.acceleration.y);
Serial.print(“,”);
Serial.println(e.acceleration.z);delay(55); // ~18 Hz
}
Set Up Edge Impulse

Step 6: Connecting to Edge Impulse
- Close Arduino Serial Monitor.
- Run the command: edge-impulse-data-forwarder –frequency 18
- Enter axis names: accX, accY, accZ
- Name your device: Arduino-Cricket-Board
- Confirm connection in Edge Impulse Studio under ‘Devices’.


Քայլ 7. Տվյալների հավաքագրում
In Edge Impulse Studio → Data acquisition:
– Device: Arduino-Cricket-Board
– Sensor: Accelerometer (3 axes)
– Սample length: 2000 ms (2 seconds)
– Հաճախականություն՝ 18 Հց
Record at least 40 samples per class:
– Cover Drive
– Straight Drive
– Pull Shot Collect Data Examples
Collect Data Examples
Կազմ Drive
Device: Arduino-Cricket-Board
Label: Cover Drive
Sensor: Sensor with 3 axes (accX, accY, accZ)
Sample length: 10000ms
Հաճախականությունը՝ 18 Հց
Example Raw Data:
accX -0.32
accY 9.61
accZ -0.12
Straight Drive
Device: Arduino-Cricket-Board
Label: Straight Drive
Sensor: Sensor with 3 axes (accX, accY, accZ)
Sample length: 10000ms
Հաճախականությունը՝ 18 Հց
Example Raw Data:
accX 1.24
accY 8.93
accZ -0.42
Pull Shot
Device: Arduino-Cricket-Board
Label: Pull Shot
Sensor: Sensor with 3 axes (accX, accY, accZ)
Sample length:10000 ms
Հաճախականությունը՝ 18 Հց
Example Raw Data:
accX 2.01
accY 7.84
accZ -0.63 
Step 8: Impulse Design
Open Create impulse:
Մուտքային բլոկ. Ժամանակային շարքերի տվյալներ (3 առանցք):
Window size: 1000 ms Window increase (stride): 200 ms Enable: Axes, Magnitude (optional), frequency 18.
Processing block: Spectral analysis (a.k.a. Spectral Features for motion). Window size: 1000 ms Window increase (stride): 200 ms Enable: Axes, Magnitude (optional), keep all defaults first.
Ուսումնական բլոկ. Դասակարգում (Կերաս):
Սեղմեք «Պահպանել իմպուլսը»։ 
Generate features:
Անցեք «Սպեկտրալ վերլուծություն» բաժին, սեղմեք «Պահպանել պարամետրերը», այնուհետև՝ «Ստեղծել հատկանիշներ մարզումների հավաքածուի համար»։

Train a small model
Go to Classifier (Keras) and use a compact config like:
Neural network: 1–2 dense layers (e.g., 60 → 30), ReLU
Epochs: 40–60
Learning rate: 0.001–0.005
Batch size: 32
Data split: 80/20 (train/test)
Save and train the data
Evaluate and Check Model testing with the holdout set.
Inspect the confusion matrix; if circle and up overlap, collect more diverse data or tweak
Spectral parameters (window size / noise floor).
Step 9: Deployment to Arduino
Go to Deployment:
Choose Arduino library (C++ library also works).
Միացրեք EON Compiler-ը (եթե հասանելի է)՝ մոդելի չափը փոքրացնելու համար։ 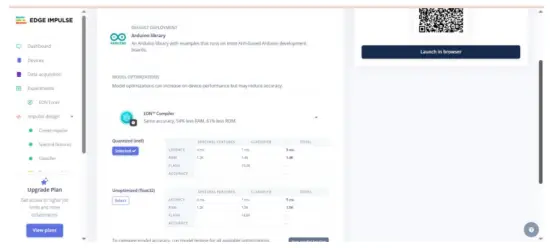 Download the .zip, then in Arduino IDE: Sketch → Include Library → Add .ZIP Library… This adds exampպակաս, քան ստատիկ բուֆերը և անընդհատ տակը File → Օրինակamples →
Download the .zip, then in Arduino IDE: Sketch → Include Library → Add .ZIP Library… This adds exampպակաս, քան ստատիկ բուֆերը և անընդհատ տակը File → Օրինակamples →
Your Project Name – Edge Impulse. Inference sketch for Arduino UNO EK R4 WiFi + ADXL345.
Step 10: Arduino Inference Sketch
#ներառել
#include <Adafruit_ADXL345_Unified.h>
#include <your_project_inference.h> // Replace with Edge Impulse header
Adafruit_ADXL345_Unified accel =
Adafruit_ADXL345_Unified(12345);
static bool debug_nn = false;
void setup() {
Serial.begin (115200);
while (!Serial) {}
if (!accel.begin()) {
Serial.println(“ERROR: ADXL345 not detected”);
մինչդեռ (1);
}
accel.setRange(ADXL345_RANGE_4_G);
}
void loop() {
float buffer[EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE] = {0};
for (size_t ix = 0; ix < EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE; ix +=
3) {
uint64_t next_tick = micros() + (EI_CLASSIFIER_INTERVAL_MS *
1000);
sensors_event_t e;
accel.getEvent(&e);
buffer[ix + 0] = e.acceleration.x;
buffer[ix + 1] = e.acceleration.y;
buffer[ix + 2] = e.acceleration.z;
int32_t wait = (int32_t)(next_tick – micros());
if (wait > 0) delayMicroseconds(wait);
}
signal_t signal;
int err = numpy::signal_from_buffer(buffer,
EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE, &signal);
if (err != 0) return;
ei_impulse_result_t result = {0};
EI_IMPULSE_ERROR res = run_classifier(&signal, &result,
debug_nn);
if (res != EI_IMPULSE_OK) return;
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf(“%s: %.3f “, result.classification[ix].label,
result.classification[ix].value);
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(“anomaly: %.3f”, result.anomaly);
#վերջ
ei_printf(“\n”);
}
Արդյունք նախկինampլե:
 Tips:
Tips:
Պահպանեք EI_CLASSIFIER_INTERVAL_MS-ը համաժամեցված ձեր տվյալների փոխանցման հաճախականության հետ (օրինակ՝ 100 Հց → 10 մվ): Edge Impulse գրադարանը այս հաստատունը սահմանում է ավտոմատ կերպով՝ հիմնվելով ձեր իմպուլսի վրա:
Եթե ցանկանում եք անընդհատ հայտնաբերում (սահող պատուհան), սկսեք «Շարունակական» տարբերակից։ample-ն ներառված է EI գրադարանում և փոխանակվում է ADXL345 ընթերցումների մեջ։
We will be adding video tutorials soon; till then, stay tuned – https://www.youtube.com/@RobuInlabs
And If you still have some doubts, you can check out this video by Edged Impulse: https://www.youtube.com/watch?v=FseGCn-oBA0&t=468s
![]()
Փաստաթղթեր / ռեսուրսներ
 |
Arduino ABX00087 UNO R4 WiFi Development Board [pdf] Օգտագործողի ուղեցույց R4 WiFi, ADXL345, ABX00087 UNO R4 WiFi Development Board, ABX00087, UNO R4 WiFi Development Board, WiFi Development Board, Development Board, Board |