Hi-Link HLK-LD2451 ավտոմեքենայի կարգավիճակի հայտնաբերման մոդուլ
Ապրանքի մասին տեղեկատվություն
Տեխնիկական պայմաններ
- Ապրանքի անվանումը: HLK-LD2451 Ավտոմեքենայի կարգավիճակի հայտնաբերման մոդուլ
- Արտադրող: Shenzhen Hi-Link Electronic Co., Ltd
- Զգացողության տեխնոլոգիա. FMCW FM շարունակական ալիքի ռադարային ազդանշանի մշակում
- Զգացող հեռավորություն. Մինչև 100 մ
- Արդյունք: Արագություն, անկյուն, հեռավորություն և այլ օժանդակ տեղեկություններ
- Ելքային ինտերֆեյս. GPIO և UART
- Հաճախականության գոտի. 24GHz ISM խումբ
- Վկայագրեր. FCC և CE
Ապրանքի օգտագործման հրահանգներ
Տեղադրում
Համոզվեք, որ մոդուլը ապահով կերպով տեղադրված է մի վայրում, որտեղ հստակ տեսանելի է այն տարածքը, որտեղ անհրաժեշտ է մեքենայի հայտնաբերումը: Միացրեք անհրաժեշտ սնուցման և կապի մալուխները:
Կոնֆիգուրացիա
Օգտագործեք տրամադրված բջջային ծրագրակազմը՝ ձեր հավելվածի պահանջներին համապատասխան կարգավորելու այնպիսի պարամետրեր, ինչպիսիք են հեռավորությունը, արագությունը, թիրախային ուղղությունը և զգայունությունը:
Ինտեգրում
Օգտագործեք GPIO կամ UART ելքը՝ հայտնաբերման մոդուլը ձեր ցանկալի խելացի տեսարանների կամ տերմինալային արտադրանքների հետ ինտեգրելու համար: «Plug-and-play» ֆունկցիան թույլ է տալիս ճկուն կիրառություն:
Գործողություն
Դիտեք իրական ժամանակի արդյունքների հայտնաբերման արդյունքները՝ տարածքից մոտ կամ հեռու գտնվող մեքենաները հայտնաբերելու համար: Անհրաժեշտության դեպքում օգտագործեք տրամադրված գործիքները բջջային վրիպազերծման և կազմաձևման համար:
Հաճախակի տրվող հարցեր (ՀՏՀ)
- Ո՞րն է HLK-LD2451 մոդուլի առավելագույն զգայական հեռավորությունը:
Մոդուլը կարող է զգալ տրանսպորտային միջոցները մինչև 100 մետր հեռավորության վրա: - Կարո՞ղ են հայտնաբերման պարամետրերը հարմարեցվել:
Այո, տրամադրված շարժական ծրագրաշարը թույլ է տալիս հեշտությամբ կարգավորել այնպիսի պարամետրեր, ինչպիսիք են հեռավորությունը, արագությունը և թիրախային ուղղությունը զգալու համար՝ հատուկ հավելվածների կարիքները բավարարելու համար: - Ո՞ր սցենարներում կարող է օգտագործվել HLK-LD2451 մոդուլը:
Մոդուլը կարող է օգտագործվել տարբեր սցենարներում, ներառյալ մայրուղիների խաչմերուկները, ոչ շարժիչային ճանապարհները, մայրուղիները և խելացի տեսարանները՝ մեքենաները հայտնաբերելու և տարբեր ծրագրերում օգնելու համար:
Ապրանք Profile
- HLK-LD2451-ը 24 ԳՀց հաճախականությամբ շարժական տրանսպորտային միջոցների կարգավիճակի ընկալման բարձր զգայունության մոդուլ է, որը մշակվել է Hi-Link Electronics-ի կողմից: Նրա աշխատանքային սկզբունքն է օգտագործել FMCW FM շարունակական ալիքը՝ թիրախը հայտնաբերելու տիրույթում, զուգակցված ռադարային ազդանշանի մշակման և ճշգրիտ ալգորիթմի ճանաչման հետ՝ իրականացնելու մեքենայի կարգավիճակի բարձր զգայունության հայտնաբերում, որը կարող է նույնականացնել տրանսպորտային միջոցները մոտ կամ հեռու, և հաշվարկել թիրախի արագությունը, անկյունը, հեռավորությունը և այլ օժանդակ տեղեկություններ:
- Այս արտադրանքը հիմնականում օգտագործվում է բացօթյա տեսարաններում՝ զգալով, թե արդյոք կա մեքենա մոտ կամ հեռու տարածքից, իրական ժամանակում ելքի հայտնաբերման արդյունքները և ամենաերկար զգայական հեռավորությունը մինչև 100 մ: Զգացողության ամենաերկար հեռավորությունը կարող է լինել մինչև 100 մ: Բջջային ծրագրակազմը տրամադրվում է հեշտությամբ կարգավորելու այնպիսի պարամետրեր, ինչպիսիք են հեռավորությունը, արագությունը, թիրախային ուղղությունը և զգայունությունը տարբեր կիրառական պահանջները բավարարելու համար:
- Աջակցում է GPIO-ին և UART-ին, միացնել և խաղալ, կարող է ճկուն կերպով կիրառվել տարբեր խելացի տեսարանների և տերմինալային արտադրանքների վրա:
Ապրանքի բնութագրերը
- Միացրեք և միացրեք, հեշտ հավաքման մեթոդ
- Զգացող հեռավորությունը մինչև 100 մ
- Բազմաստիճան խելացի պարամետրիզացիա՝ տեսարանի փոփոխությունների կարիքները բավարարելու համար
- Բջջային վրիպազերծման և կազմաձևման գործիքներ
- Կարգավորելի հայտնաբերման հեռավորություն (10-100 մ ազատ կարգավորելի)
- Լայն հայտնաբերման անկյուն, որը ծածկում է մինչև 3 երթևեկության գոտի
- 24 ԳՀց ISM տիրույթ, FCC և CE սպեկտրի կարգավորում՝ վավերացված
- Վերջնական ծախսարդյունավետ ընտրություն
Կիրառման սցենարներ
HLK-LD2451 տրանսպորտային միջոցների սենսորային մոդուլը կարող է հայտնաբերել և ճանաչել մեքենային մոտ կամ հեռու գտնվող տրանսպորտային միջոցները, աջակցում է բազմաստիճան պարամետրացմանը և կարող է լայնորեն օգտագործվել տարբեր խելացի արտադրանքներում և տերմինալային արտադրանքներում, սովորաբար օգտագործվող տեսակները հետևյալն են.
- Մայրուղու խաչմերուկ
Տեղադրված մայրուղիների խաչմերուկներում՝ այն զգում է մայրուղով ընթացող տրանսպորտային միջոցների ուղղությունը՝ մոտ կամ հեռու, արագությունը, հեռավորությունը և այլն: - Ոչ շարժիչային ճանապարհ
Հետևի տեսադաշտում կույր կետի հայտնաբերում, ետևից մեքենայի մոտենալու և գիծը հանկարծակի փոխելու հետևանքով առաջացած ավտովթարից խուսափելու համար - Մայրուղի
Հետևում գտնվող հեռավոր տրանսպորտային միջոցների հայտնաբերում, վարորդին օգնելու համար որոշելու դրանց հետևում գտնվող մեքենայի հետագիծը - Խելացի տեսարան
Տրանսպորտային միջոցների մոտեցման զգացում, ճանապարհային դարպասների, ավտոտնակի դռների և այլ տեսարանների ավտոմատ կառավարում, որոնք ավտոմատ կերպով բացվում կամ փակվում են
Սարքավորման նկարագրություն
Արտաքին չափերը
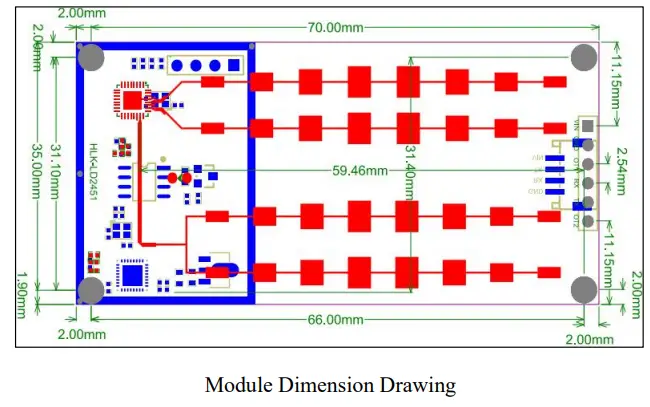
- Մոդուլի չափը70 մմ x 35 մմ
- Անցքերի տարածություն. 2.54 մմ
Փին սահմանումներ

| Փին
Համար |
նշում | անունը (մի բանի) | ֆունկցիոնալությունը |
| 1 | VIN | Էլեկտրաէներգիայի մուտքագրում | Էլեկտրաէներգիայի մատակարարում 5 Վ |
| 2 | GND | POWER GROUND | POWER GROUND |
| 3 | OT1 | GPIO1 | Ցուցանիշի քորոց, 3 անընդմեջ բարձր և ցածր ելքեր առաջին գործարկման ժամանակ Արդյունքները բարձր մակարդակ են, երբ հայտնաբերվում է, որ մարդ մոտենում է |
| 4 | TX | Serial TX | Serial TX Pin |
| 5 | RX | RX սերիական պորտ | Serial RX Pin |
| 6 | OT2 | GPIO2 | Ժամանակավորապես անհասանելի է |
Օգտագործում և կազմաձևում
Տիպիկ կիրառական միացում
- LD2451 մոդուլը հիմնականում սերիական պորտի միջոցով սահմանված արձանագրության միջոցով տվյալների ելքի արդյունքների հայտնաբերման համար, սերիական պորտի ելքային տվյալները պարունակում են ազդանշանային տեղեկատվության թիրախ (նպատակի փակմամբ կամ առանց) անկյուն, հեռավորություն, արագության ուղղություն (մոտ կամ հեռու) և այլ տեղեկություններ, այլ նաև Bluetooth-ի միջոցով ընդունել տվյալների հայտնաբերման արդյունքները, ելքի սերիական պորտի բովանդակությունը և նույնը: Օգտագործողները կարող են ճկուն կերպով օգտագործել այն՝ համաձայն հավելվածի կոնկրետ սցենարների:
- Մոդուլի մատակարարման հատtage-ը 5 Վ է, իսկ մուտքային սնուցման պալատի հզորությունը պահանջվում է ավելի քան 300 մԱ:
- IO մոդուլի ելքային մակարդակը 3.3 Վ է, սերիական պորտի լռելյայն բուդ արագությունը 115200 է, 1 կանգառ բիթ, հավասարաչափ բիթ չկա:
Կազմաձևման պարամետրերի դերը
- Օգտատերերը կարող են փոփոխել մոդուլի կազմաձևման պարամետրերը LD2451-ի կամ Bluetooth-ի սերիական միացքի միջոցով՝ հարմարվելու տարբեր հավելվածների պահանջներին, և անջատումից հետո կազմաձևման բովանդակությունը չի կորչի:
- Կարգավորելի պարամետրերը ներառում են հետևյալը.
- Առավելագույն հայտնաբերման հեռավորությունը
- Սահմանեք հայտնաբերման ամենահեռավոր հեռավորությունը, միայն այս ամենահեռավոր հեռավորության վրա հայտնված թիրախները կհայտնաբերվեն, և արդյունքը կհայտնվի:
- Կարգավորման միջակայքը 0-100 մ
- Ստուգման ուղղություն
Կարգավորելի է հայտնաբերել միայն մոտ կամ հեռու և մոտ և հեռու թիրախները:
- Առավելագույն հայտնաբերման հեռավորությունը
- Սահմանել, որ փակվի և թողարկվի թիրախը միայն այն դեպքում, երբ նույն ուղղությամբ ընթացող մեքենան մոտենում և բավարարում է որոշակի պայմաններ, սահմանվում է հեռավորության վրա և թիրախ է դուրս բերում միայն այն ժամանակ, երբ հակառակ մեքենան կամ շրջակա միջավայրը մտնում է ռադարային հայտնաբերման տիրույթ՝ մոտ և հեռու՝ անկախ նրանից։ այն մասին, թե արդյոք նույն ուղղությամբ կամ հակառակ ուղղությամբ մեքենան մտնում է հայտնաբերման տիրույթ, կարտադրի հայտնաբերված թիրախային տեղեկատվությունը:
- Հայտնաբերման արագություն
- Հայտնաբերված թիրախային արագությունը ավելի մեծ է, քան սահմանված հայտնաբերման արագությունը, նախքան այն կդիտարկվի որպես թիրախ, հակառակ դեպքում, այն անտեսվում է
- Արագության հայտնաբերումը կարող է սահմանվել 0-120 կմ/ժ միջակայքում
- Հայտնաբերման ուշացում
Տագնապի հետաձգման ժամանակը, երբ ռադարը հայտնաբերում է թիրախի մոտենալը, միջակայքը 1-30 վրկ, օրինակ, եթե ժամանակը սահմանված է 5 վրկ, եթե ռադարը հայտնաբերում է թիրախի մոտենալը, այն կթողարկի հետաձգված տագնապի հաղորդագրություն 5 վրկ, և եթե ռադարը հայտնաբերում է մոտեցող թիրախ: կրկին այս ժամանակահատվածում, այն այս անգամ կթարմացվի: - Զգայունություն
- Այս պարամետրն ունի երկու ենթապարամետր՝ ձգանների կուտակային քանակ և ազդանշան-աղմուկ հարաբերակցության շեմ: Երկու բառի պարամետրերը կարող են սահմանվել ինքնուրույն, ձգանման պարամետրի սահմանման միջակայքը 1~10 է, իսկ ազդանշան-աղմուկ հարաբերակցության պարամետրի սահմանման միջակայքը 1~255 է:
- Եթե Trigger Count-ը դրված է 3-ի, ապա հայտնաբերված թիրախը գործարկվում է 3 անգամ անընդմեջ՝ նախքան թիրախի հայտնաբերման մասին տեղեկատվության հաղորդումը:
- Ազդանշան-աղմուկ հարաբերակցության պարամետրը որոշում է ռադարի հայտնաբերման զգայունությունը, որքան ցածր է հայտնաբերման զգայունության արժեքը, այնքան բարձր է ձգանը, այնքան բարձր է հայտնաբերման զգայունության արժեքը, այնքան ցածր ձգանն ավելի դժվար է (կանխադրված արժեքը 4 է, հատուկ հանգամանքներ չկան, այս պարամետրը խորհուրդ չի տրվում փոփոխել)
- Հայտնաբերման արագություն
Բջջային հավելվածի գործիքի նկարագրությունը
Օգտատերերին հեշտացնելու համար արագ և արդյունավետ կերպով փորձարկել և կարգավորել մոդուլը, տրամադրել շարժական APP-ի կազմաձևման և հայտնաբերման գործիքներ, օգտվողները կարող են օգտագործել այս գործիքի ծրագրային կապի մոդուլը Bluetooth-ը, պարամետրերի կազմաձևման և ընթերցման մոդուլը, բայց նաև կարող են ստանալ մոդուլը զեկուցելու համար: տվյալների հայտնաբերման արդյունքները, թիրախի տեղեկատվության հայտնաբերման իրական ժամանակի ցուցադրումը, մեծապես հեշտացնելով օգտագործողի օգտագործումը:
- Բեռնել Հասցե:
- Android APP-ի ներբեռնման հղումը՝ https://www.pgyer.com/Lq8p
- IOS հավելված. ՈրոնելHLKRadarTool-ը App Store-ում App Store
- APP-ի օգտագործումը.
- Մոդուլը նորմալ միացնելուց հետո այն կուղարկի «LD2451_XX» անունով Bluetooth;
- Հավելվածը բացելուց հետո՝ համապատասխան թույլտվությունները միացնելու համար, սեղմեք Միացնել մոդուլը Bluetooth;
- Հայտնաբերված թիրախային տվյալների տեղեկատվությունը կցուցադրվի այս ինտերֆեյսին, ինչպես նաև համապատասխան արձանագրության տվյալները հաջող միացումից հետո.
- Կտտացրեք կարգավորումների ինտերֆեյսի վերին աջ անկյունին, որպեսզի մուտքագրեք պարամետրերի կարգավորումների միջերեսը, պարամետրերը, որոնք կարող են սահմանվել և վերը նշված «կազմաձևման պարամետրերի դերը»:
APP-ի հայտնաբերման տվյալների տեղեկատվությունը ներկայացված է ստորև.

Պարամետրի կարգավորումների ինտերֆեյս.

Տեղադրման սխեմատիկ և մոնտաժային կողմնորոշում
Տեղադրման տեղ.

Տեղադրման պայմանները
Ստուգեք մոնտաժի նվազագույն բացը
Եթե ռադարը պետք է տեղադրվի խցիկով, ապա պարիսպը պետք է ունենա ալիքի փոխանցման լավ բնութագրեր 24 ԳՀց հաճախականությամբ և չպետք է պարունակի մետաղական նյութեր կամ նյութեր, որոնք պաշտպանում են էլեկտրամագնիսական ալիքներից:
Նախազգուշական միջոցներ տեղադրման համար
- Համոզվեք, որ ռադիոտեղորոշիչի ալեհավաքը հնարավորինս շատ ուղղված է դեպի այն տարածքը, որը պետք է հայտնաբերվի, և որ ալեհավաքի շուրջը բաց է և անխոչընդոտ:
- Համոզվեք, որ սենսորը տեղադրված է ամուր և կայուն դիրքում, քանի որ ռադարի ցնցումն ինքնին կազդի հայտնաբերման արդյունքների վրա:
- Կարևոր է ապահովել, որ ռադարի հետևի մասը ենթակա չէ օբյեկտների շարժման կամ թրթռումների: Քանի որ ռադարային ալիքները թափանցում են, ալեհավաքի ազդանշանի հետևի փեղկը կարող է հայտնաբերել ռադարի հետևի մասում գտնվող շարժվող առարկաները: Մետաղական վահանը կամ մետաղական հենակետային ափսեը կարող է օգտագործվել ռադարի հետևի կափույրը պաշտպանելու և ռադարի հետևի վրա գտնվող առարկաների ազդեցությունը թուլացնելու համար:
Կատարողական և էլեկտրական պարամետրեր
| Գործողության հաճախականությունը | 24 ԳՀց ~ 24.25 ԳՀց
Համապատասխանում է FCC, CE, No Commission սերտիֆիկացման ստանդարտներին |
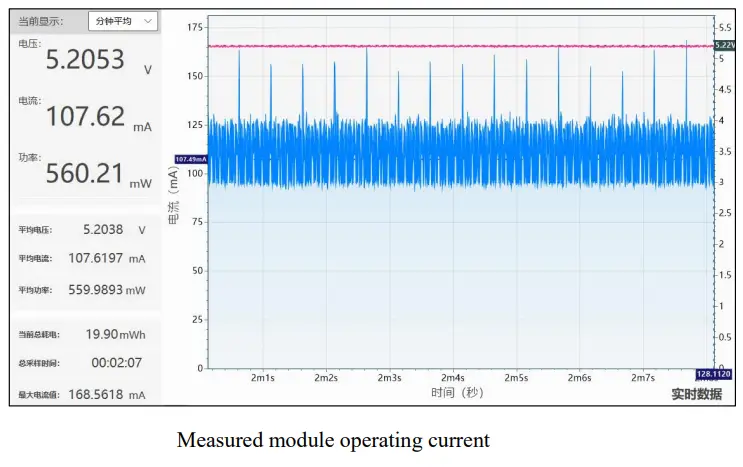
| Էլեկտրաէներգիայի պահանջներ | DC 5V, սնուցման հզորությունը >300 մԱ |
| Միջին գործառնական հոսանքը | 107 մԱ |
| Մոդուլյացիայի մեթոդ | FMCW |
| Միակցիչ | 2 GPIO, IO մակարդակ 3.3V
1 UART |
| Թիրախ դիմումը | Արտաքին մեքենայի թիրախի հայտնաբերում |
| Հայտնաբերման հեռավորությունը | Մինչև 100 մ |
| Հայտնաբերման անկյուն | ±20° |
| Մաքրել թողունակությունը | <200 ՄՀց
Համապատասխանում է FCC, CE և No Commission սերտիֆիկացման ստանդարտներին |
| Գործող ջերմաստիճանը | -40~85°C |
| Ընդհանուր չափերը | 70 մմ x 35 մմ |
Վերանայված գրառումներ
| Վերանայման ամսաթիվը | Թողարկումներ | Փոփոխության բովանդակությունը |
| 2024-5-7 | 1.0 | Նախնական տարբերակը |
Տեխնիկական աջակցություն և կոնտակտներ
- Shenzhen Hi-Link Electronic Co., Ltd
- Հասցե՝ 17F, շենք E, Xinghe WORLD, Minzhi Street, Long
- Հուա շրջան, Շենժեն 51813
- Էլ. sales@hlktech.com
- Webկայքը: www.hlktech.net
Փաստաթղթեր / ռեսուրսներ
 |
Hi-Link HLK-LD2451 ավտոմեքենայի կարգավիճակի հայտնաբերման մոդուլ [pdf] Օգտագործողի ձեռնարկ HLK-LD2451 Ավտոմեքենայի կարգավիճակի հայտնաբերման մոդուլ, HLK-LD2451, Տրանսպորտային միջոցի կարգավիճակի հայտնաբերման մոդուլ, կարգավիճակի հայտնաբերման մոդուլ, հայտնաբերման մոդուլ, մոդուլ |



