![]() Ամերիկյան Control Electronics ապրանքանիշ
Ամերիկյան Control Electronics ապրանքանիշ
MDVF03
Բաց շասսի միկրոպրոցեսորի վրա հիմնված
Փոփոխական հաճախականության շարժիչ՝ մեկ և եռաֆազ AC շարժիչների մեկուսացմամբ
Տեխնիկական պայմաններ
| Մոդել | Տող Voltage (VAC) | Շարժիչ Voltage (VAC) | Շարժիչի շարունակական հոսանք (Amps) | Շարժիչի ձիաուժի միջակայք |
| MDVF03-D230-PCM | 115 կամ 230 | 115 230 | 3.0* | 1/16 – 3/8 1/8 – 3/4 |
* Երբ տեղադրվում է, որպեսզի թույլ տա օդի հոսքը դեպի վերև ափսեով:
* Գնահատեք մինչև 2.5 amps երբ տեղադրվում է որևէ այլ կոնֆիգուրացիայով:
AC Line Voltage……………115 / 230 VAC ± 10%, 50/60 Հց, մեկ փուլ
AC Line Current with 115 VAC line voltage 115V շարժիչով………………………………………………………………………………… amps
AC Line Current with 115 VAC line voltage 230V շարժիչով………………………….10.7 amps
AC Line Current with 230 VAC line voltage 230V շարժիչով………………………………………………………………………………… amps
AC Motor Voltage ……………………………………………115 կամ 230 VAC, 50/60 Հց, մեկ կամ եռաֆազ
Ծանրաբեռնվածության հնարավորություն…………………………………………………..200% (2x) 1 րոպեի համար
Ստանդարտ փոխադրողի հաճախականությունը ................................................... 1.6 կամ 16 կՀց
Ելքային հաճախականության տիրույթ………………………………………….0 – 120 Հց
DC Injection Voltagե…………………………………………………………… 0 – 27 VDC
DC Injection Voltage Ժամանակը………………………………………………………… 0 – 5 վայրկյան
Արագացման ժամանակի միջակայք (0 – 60 Հց)……………………………………..0.5 – 12 վայրկյան
Դանդաղեցման ժամանակի միջակայքը (60 – 0 Հց)……………………………………….0.5 – 12 վայրկյան
Անալոգային մուտքային ազդանշանի տիրույթ…………………………………………………..0 ± 5 VDC, 0 ± 10 VDC, 4 – 20 mA
Մուտքային դիմադրություն (S1-ից S2)………………………………………………………..> 50K ohms
Առավելագույն թրթռում (0 – 50 Հց, >50 Հց)……………………………… 0.5 Գ, առավելագույնը 0.1 Գ
Շրջապատող օդի ջերմաստիճանի միջակայքը………………………………………………………………………………32°F – 104°F (0°C – 40°C)
Քաշը……………………………………………………………………………………….1.20 ֆունտ (0.54 կգ)
Անվտանգության վկայագրեր……………………………………………………………………………………………………………………………. File #E132235
Անվտանգության նախազգուշացումներ
ԿԱՐԴԱՑԵ՛Ք ԱՆՎՏԱՆԳՈՒԹՅԱՆ ԲՈԼՈՐ ԶԳՈՒՇԱՑՈՒՄՆԵՐԸ ԱՅՍ ՍԱՐՔԱՎՈՐՈՒՄԸ ՏԵՂԱԴՐԵԼՈՒՑ առաջ
- ՄԻ ՏԵՂԱԴՐԵՔ, ՀԵՌԱՑՆԵՔ ԿԱՄ ՎԵՐԱՄԱԼԱՐԻՐԵՔ ԱՅՍ ՍԱՐՔԱՎՈՐՈՒՄԸ ԿԻՐԱՌՎԱԾ ՀԷՑԻՑ: Այս սարքավորումը տեղադրի, կարգավորի և սպասարկի որակյալ էլեկտրատեխնիկը: Սարքավորումներ տեղադրելիս հետևեք Ազգային Էլեկտրական օրենսգրքին և էլեկտրական և անվտանգության բոլոր կիրառելի կոդերին, ներառյալ Աշխատանքի անվտանգության և առողջության մասին օրենքի (OSHA) դրույթները:
- Շղթայի պոտենցիալները գտնվում են 115 կամ 230 VAC երկրագնդի գետնից: Խուսափեք տպագիր տպատախտակի կամ սխեմայի տարրերի հետ անմիջական շփումից՝ լուրջ վնասվածքների կամ մահացու վտանգը կանխելու համար: Օգտագործեք ոչ մետաղական պտուտակահան՝ տրամաչափման զարդարված կաթսաները կարգավորելու համար: Օգտագործեք հաստատված անհատական պաշտպանության սարքավորումներ և մեկուսացված գործիքներ, եթե այս սկավառակի վրա աշխատում եք հոսանքի կիրառմամբ:
- Նվազեցրեք էլեկտրական հրդեհի, հարվածի կամ պայթյունի հավանականությունը՝ օգտագործելով համապատասխան հողակցման տեխնիկա, գերհոսանքից պաշտպանություն, ջերմային պաշտպանություն և պարիսպ: Հետևեք առողջ պահպանման ընթացակարգերին:
- Minarik Drives-ը խստորեն խորհուրդ է տալիս տեղադրել հիմնական հոսանքի անջատիչը գծի հատորումtagե մուտքագրում: Անջատիչի կոնտակտները պետք է գնահատվեն 250 VAC և շարժիչի ցուցանակի հոսանքի 200%-ի համար:
- AC գծի հոսանքի հեռացումը վթարային դադարեցման միակ ընդունելի մեթոդն է: Մի օգտագործեք DC ներարկման արգելակում, դանդաղեցրեք մինչև նվազագույն արագություն կամ մի վազեք մինչև կանգառ վթարային կանգառի համար: Նրանք չեն կարող կանգնեցնել սկավառակը, որը անսարք է:
- Գծի սկիզբ և կանգtagե) խորհուրդ է տրվում միայն շարժիչը հազվադեպ գործարկելու և կանգնեցնելու համար: Հաճախակի մեկնարկների և կանգառների դեպքում խորհուրդ է տրվում վերականգնողական արգելակում, դանդաղեցում մինչև նվազագույն արագություն կամ վազում մինչև կանգառ: Հաճախակի մեկնարկը և կանգառը կարող են մեծ ոլորող մոմենտ ստեղծել: Սա կարող է վնասել շարժիչներին:
- Մի անջատեք շարժիչի հաղորդալարերից որևէ մեկը, եթե հոսանքը չհեռացվի կամ շարժիչը հաշմանդամ է. Երբ սկավառակն աշխատում է, բացելը կարող է վնասել սկավառակը:
- Ոչ մի դեպքում չպետք է միացվեն հոսանքի և տրամաբանական մակարդակի լարերը:
- Համոզվեք, որ պոտենցիոմետրի ներդիրները չեն շփվում պոտենցիոմետրի մարմնի հետ: Մուտքի հիմնավորումը կվնասի սկավառակին:
- Միացեք միայն L2-DBL տերմինալին, եթե օգտագործում եք 115 VAC գիծ 120 VAC-ից բարձր գնահատված շարժիչով:
- Պետք է զգուշություն ցուցաբերել օդափոխիչով հովացվող շարժիչները ցածր արագություններով աշխատելիս, քանի որ դրանց օդափոխիչները կարող են բավարար քանակությամբ օդ չտեղափոխել շարժիչը պատշաճ կերպով սառեցնելու համար: Minarik Drives-ը առաջարկում է «inverter-duty» շարժիչներ, երբ արագության միջակայքը գերազանցում է 10:1-ը:
- Այս ապրանքը չունի ներքին պինդ վիճակի շարժիչի գերբեռնվածության պաշտպանություն: Այն չի պարունակում արագության նկատմամբ գերծանրաբեռնված պաշտպանություն, ջերմային հիշողության պահպանում կամ դրույթներ՝ հեռակառավարվող սարքերից ազդանշաններ ընդունելու և դրանց վրա ջերմաստիճանից պաշտպանվելու համար: Եթե վերջնական օգտագործման արտադրանքում անհրաժեշտ է շարժիչի պաշտպանություն, ապա այն պետք է ապահովվի լրացուցիչ սարքավորումներով՝ NEC ստանդարտներին համապատասխան:
Չափերը
 Տեղադրում
Տեղադրում
Մոնտաժում
- Շարժիչի բաղադրիչները զգայուն են էլեկտրաստատիկ լիցքաթափման նկատմամբ: Խուսափեք շղթայի հետ անմիջական շփումից: Մեքենան պահեք միայն ափսեի մոտ:
- Պաշտպանեք շարժիչը կեղտից, խոնավությունից և պատահական շփումից:
- Ապահովեք բավարար տարածք տերմինալների և տրամաչափման զարդարման կաթսաների մուտքի համար:
- Տեղադրեք շարժիչը ջերմության աղբյուրներից հեռու: Աշխատեք շարժիչը շրջապատող օդի գործող ջերմաստիճանի նշված տիրույթում:
- Կանխեք չամրացված միացումները՝ խուսափելով շարժիչի ավելորդ թրթռումից:
- Տեղադրեք սկավառակը իր տախտակով կամ հորիզոնական կամ ուղղահայաց հարթության վրա: Վեց 0.17 դյույմ (4 մմ) անցք ափսեի մեջ ընդունում են #8 թավայի գլխի պտուտակները: Հորիզոնական տեղադրման դեպքում սկավառակը պետք է իջեցվի մինչև 2.5 amps.
- Թիթեղը պետք է հողով հիմնված լինի:
Հաղորդալարեր. Օգտագործեք 16 – 18 AWG 75°C մետաղալար AC գծի (L1, L2, L2-DBL) և շարժիչի (U/A2, V/A1, W) լարերի համար: Օգտագործեք 18 – 24 AWG մետաղալար տրամաբանական միացման համար (COM, DIR, EN, Sl, S2, S3): Հետևեք NEC ստանդարտներին էլեկտրահաղորդման համար: Ներքևի տախտակի վրա TB502 հոսանքի տերմինալի ձգման ոլորող մոմենտը 9 լբ-ին է (1.0 Նմ): TB501 և TB502 տրամաբանական տերմինալների ձգման ոլորող մոմենտը վերին տախտակի վրա կազմում է 1.77 լբ-ին (0.2 Նմ):
Պաշտպանման ուղեցույցներՈրպես ընդհանուր կանոն, խորհուրդ է տրվում պաշտպանել բոլոր հաղորդիչները: Եթե հոսանքի հաղորդիչները պաշտպանելը գործնական չէ, խորհուրդ է տրվում պաշտպանել տրամաբանական մակարդակի բոլոր լարերը: Եթե տրամաբանական մակարդակի լարերի պաշտպանությունը գործնական չէ, օգտվողը պետք է շրջի բոլոր տրամաբանական լարերը՝ նվազագույնի հասցնելու առաջացած աղմուկը: Հնարավոր է, որ անհրաժեշտ լինի հողակցել պաշտպանված մալուխը: Եթե աղմուկը առաջանում է շարժիչից բացի այլ սարքերից, ապա հողացրեք վահանը շարժիչի ծայրում: Եթե շարժիչի կողմից աղմուկ է առաջանում, ապա վահանը հողացրեք սկավառակի ծայրից հեռու: Վահանի երկու ծայրերը մի հղկեք:
Կարճ միացման հոսանքի վարկանիշ (SCCR): Այս սկավառակը հարմար է սիմետրիկ սխեմայի վրա օգտագործելու համար, որը կարող է ապահովել ոչ ավելի, քան 5,000 rms սիմետրիկ Amperes, 115/230 վոլտ առավելագույնը:
Մասնաճյուղի շրջանի պաշտպանություն. Այս արտադրանքը ունի ինտեգրալ պինդ վիճակի շղթայի պաշտպանություն, որը չի ապահովում ճյուղերի շղթայի պաշտպանություն: Մասնաճյուղերի սխեմայի պաշտպանությունը պետք է ապահովվի համաձայն Ազգային Էլեկտրական օրենսգրքի և տեղական ցանկացած լրացուցիչ ծածկագրի: UL Listing-ը պահանջում է դասի J, CC կամ T դասի ապահովիչների օգտագործում, որոնք գնահատվում են նվազագույնը 230 VAC: Խորհուրդ է տրվում օգտագործել շարժիչի առավելագույն հոսանքի 200%-ի չափով ապահովիչներ, բացառությամբ այն դեպքերի, երբ մեքենան օգտագործվում է կրկնապատկերով, որի դեպքում ապահովիչները պետք է գնահատվեն շարժիչի առավելագույն հոսանքի 400%-ի համար: Ապահովեք AC գծի HOT ոտքը, երբ օգտագործում եք 115 VAC, և երկու գծերը, երբ օգտագործում եք 230 VAC:
POWER (ներքևի տախտակ)
AC Line Մուտք
Միացրեք AC գիծը voltage դեպի L1 և L2 տերմինալներ: Եթե պետք է օգտագործվի կրկնակի ռեժիմ (230 VAC ելք 115 VAC մուտքով), միացրեք AC գծի լարըtage դեպի L1 և L2-DBL տերմինալներ: Մի միացնեք L2-DBL-ին, եթե օգտագործում եք 230 VAC գծի աղբյուր:
Շարժիչ
Շարժիչի լարերը միացրեք U/A2, V/A1 և W տերմինալներին: Եթե շարժիչը չի պտտվում ցանկալի ուղղությամբ, անջատեք շարժիչը և հետ դարձրեք այս երեք միացումներից երկուսը:
ՏՐԱՄԱԲԱՆՈՒԹՅՈՒՆ (ՎԵՐԻՆ ՏԱՂԱՏԱԿ)
Արագության պոտենցիոմետր
Արագության վերահսկման համար օգտագործեք 10K ohm, 1/4 Վտ պոտենցիոմետր: Պոտենցիոմետրի հակառակ ծայրը միացրեք S1-ին, մաքրիչը S2-ին, իսկ ժամացույցի սլաքի ուղղությամբ՝ S3-ին: Եթե պոտենցիոմետրն աշխատում է ցանկալի ֆունկցիոնալությունից հակառակ, (այսինքն՝ շարժիչի արագությունը մեծացնելու համար դուք պետք է պտտեք պոտենցիոմետրը ժամացույցի հակառակ մետաղալարով), անջատեք սկավառակը և փոխեք S1 և S3 միացումները:
Անալոգային մուտքային ազդանշանի տիրույթ
Պոտենցիոմետր օգտագործելու փոխարեն սկավառակը կարող է միացված լինել անալոգային մուտքային ազդանշանին հետևելու համար: Այս մուտքային ազդանշանը կարող է լինել ծավալի տեսքովtage (0 ± 5, 0 ± 10 VDC) կամ ընթացիկ (4- 20 մԱ): Ներկառուցված մեկուսացումը թույլ է տալիս մուտքային ազդանշանը հիմնավորված կամ չհիմնավորված (լողացող): Միացրեք ընդհանուր / բացասական (-) ազդանշանը S1-ին և ազդանշանի հղումը /դրական (+) S2-ին: Տե՛ս «Սկսում» բաժինը՝ կապված jumper-ի կարգավորումների համար:
Միացնել
Կարճ տերմինալներ EN և COM՝ շարժիչի արագությունը սահմանելու համար: Բացեք ENABLE տերմինալները՝ շարժիչը մոտեցնելու կամ արգելակելու համար մինչև զրոյական արագություն: Թռիչքների կարգավորումների համար տե՛ս DIP անջատիչ 3 Statup բաժնում: Եթե ENABLE անջատիչ չի պահանջվում, միացրեք ցատկող COM և EN տերմինալների միջև: Մի օգտագործեք հնարավորությունը վթարային կանգառի համար:
Ուղղություն
Կարճ տերմինալներ DIR և COM՝ շարժիչի ուղղությունը փոխելու համար: Եթե ուղղության անջատիչ չի ուզում, թողեք այս կապը բաց:
Սկսնակ
ԸՆՏՐԵԼ Անջատիչներ
Ընտրեք անջատիչ (SW501)
Dip Switch 1. ON – 115 VAC ելք – Սահմանում է 115 VAC ելք կամ 115 կամ 230 VAC մուտքով:
OFF – 230 VAC ելք – Սահմանում է 230 VAC ելք կամ 115 կամ 230 VAC մուտքով:
Dip Switch 1:
Dip Switch 2. ON – 50 Hz – Սահմանում է 50 Հց հիմնական հաճախականությունը ելքի վրա:
OFF – 60 Հց – Ելքի վրա սահմանում է 50 Հց բազային հաճախականություն:
Dip Switch 1:
Dip Switch 3: ON – Արգելակի ռեժիմ – ENABLE անջատիչը բացելը շարժիչը կբերի զրոյական արագության
DC ներարկման արգելակում` առանց դեկոլը կիրառելուamp.
Dip Switch 1:
OFF – Միացնել ռեժիմը – ENABLE անջատիչը բացելով շարժիչը կկանգնեցնի:
Dip Switch 4. ON – 1.6 kHz Carrier Frequency (լսելի է, բայց կանխում է GFI-ի անջատումը):
OFF – 16 kHz կրիչի հաճախականություն (Անլսելի, բայց կարող է առաջացնել GFI-ի անջատում):
Dip Switch 1:

ՄԵԿՆԱՐԿՈՒՄ
– Ստուգեք, որ տպագիր տպատախտակի վրա օտար հաղորդիչ նյութ չկա:
– Համոզվեք, որ բոլոր անջատիչները և ցատկերները պատշաճ կերպով դրված են:
- Պտտեք արագության ճշգրտման պոտենցիոմետրը լրիվ հակառակ ուղղությամբ (CCW) կամ սահմանեք անալոգային մուտքային ազդանշանը 1. նվազագույնի:
- Կիրառել AC գիծ voltage.
- Փակեք միացման անջատիչը և ստուգեք, որ կանաչ սնուցման լուսադիոդը (IL1), եթե թարթում է:
- Դանդաղ առաջացրեք արագությունը կարգավորեք պոտենցիոմետրը ժամացույցի սլաքի ուղղությամբ (CW) կամ ավելացրեք անալոգային մուտքային ազդանշանը: Շարժիչը պետք է արագանա, երբ պոտենցիոմետրը պտտվում է CW կամ անալոգային ազդանշանը մեծանում է: Շարունակեք մինչև ցանկալի արագության հասնելը:
- Հեռացնել AC գիծ voltage շարժիչից մինչև շարժիչը կանգնեցնելը:
LED-ներ
Հզորություն (IL1): Կանաչ LED-ը ամուր է, երբ AC գծի ծավալըtage-ը կիրառվում է սկավառակի վրա, բայց սկավառակն անջատված է: Այն թարթում է ամեն անգամ, երբ AC գծի voltage-ը կիրառվում է սկավառակի վրա և սկավառակը միացված է:
Կարգավիճակը (IL2): Կարմիր LED-ն ամուր է, երբ ընթացիկ սահմանաչափում է կամ թարթում է հետևյալ անսարքության կոդը.
2 Փայլեր. Undervoltage – Ներքին DC BUS voltage-ը շատ ցածր է ընկել:
3 Բռնկում. Overvoltage – Ներքին DC BUS voltage բարձրացավ չափազանց բարձր:
4 Թարթում. Ընթացքի սահմանաչափ կամ կարճ միացում – Սկավառակը գտնվում է ընթացիկ սահմանաչափի մեջ կամ հայտնաբերել է շարժիչի վրա կարճ միացում:
5 Թարթում՝ գերջերմաստիճանի անջատում – շարժիչի ջերմաստիճանը հասել է կրիտիկական ջերմաստիճանի:
6 Թարթում՝ գերջերմաստիճանի նախազգուշացում – շարժիչի ջերմաստիճանը մոտենում է կրիտիկական ջերմաստիճանին: Շարժիչի առավելագույն հոսանքը աստիճանաբար նվազում է, երբ շարժիչի ջերմաստիճանը բարձրանում է:
Հեղինակային իրավունք 2018 American Control Electronics®-ի կողմից – Բոլոր իրավունքները պաշտպանված են: Սույն փաստաթղթի ոչ մի մաս չի կարող վերարտադրվել կամ վերարտադրվել որևէ ձևով՝ առանց American Control Electronics®-ի գրավոր թույլտվության: Սույն փաստաթղթում առկա տեղեկատվությունը և տեխնիկական տվյալները ենթակա են փոփոխման առանց ծանուցման: American Control Electronics®-ը որևէ երաշխիք չի տալիս այս նյութի առնչությամբ, ներառյալ, բայց չսահմանափակվելով դրանց առևտրականության և որոշակի նպատակի համար համապատասխանության ենթադրյալ երաշխիքներով: American Control Electronics®-ը պատասխանատվություն չի կրում որևէ սխալի համար, որը կարող է հայտնվել այս փաստաթղթում և պարտավորություն չի ստանձնում թարմացնել կամ պահպանել այս փաստաթղթում առկա տեղեկատվությունը:
Գործողություն
ՇԱՐԺԱՐԱՐԻ ՏԵՍԱԿՆԵՐԸ
Շարժիչների ընդունելի տեսակներն են 3 փուլային ինդուկցիոն, մշտական բաժանվող կոնդենսատոր (PSC), ստվերավորված բևեռ և AC համաժամանակյա: Խորհուրդ չի տրվում օգտագործել կոնդենսատոր-ստարտ տեսակի շարժիչներ:
PMF շարքը նախատեսված է տարբեր հաճախականության և համաչափ ծավալի ելքի համարtage միաֆազ շարժիչի արագությունը փոխելու համար: Այնուամենայնիվ, միաֆազ շարժիչները օպտիմիզացված են ամբողջ արագությամբ շահագործման համար և կարող են չաշխատել ակնկալվող մոմենտով այլ արագություններով, քան լրիվ անվանական արագությունը: Քանի որ PMF-ն ունի մեկ փուլային 115 VAC մուտքը եռաֆազ 230 VAC ելքի վերածելու հնարավորություն, խորհուրդ է տրվում օգտագործել եռաֆազ շարժիչներ նոր ծրագրերում:
Շարժիչային միացումներ
Մեկ փուլային շահագործում – ոչ հետադարձ
Մեկ փուլային աշխատանքի համար միացրեք շարժիչը, ինչպես ցույց է տրված ստորև նկարում: Համոզվեք, որ նախապես միացված կոնդենսատորը և դրա հետ կապված շարժիչի կծիկը միացված են U և V տերմինալներին, ինչպես ցույց է տրված: Այս կապը կարող է լինել ներքին, եթե օգտագործեք 2 լարային շարժիչ: Եթե շարժիչն ունի երեք լար, դուք պետք է ինքներդ կատարեք այս միացումը: Միաֆազ շահագործում – հետընթաց
Միաֆազ շահագործում – հետընթաց
Հեռացրեք կոնդենսատորը և միացրեք շարժիչը, ինչպես ցույց է տրված ստորև նկարում: Թեև թույլ է տալիս պինդ վիճակում հետընթաց կատարել, այս էլեկտրահաղորդման սխեման կարող է հանգեցնել շարժիչի ոչ օպտիմալ աշխատանքի: Կախված շարժիչի կառուցվածքից և կիրառման պահանջներից, հնարավոր է, որ շարժիչը զրոյացվի: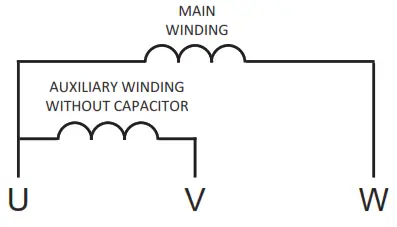
Եռաֆազ շահագործում
Եռաֆազ աշխատանքի համար միացրեք շարժիչը, ինչպես ցույց է տրված ստորև նկարում: Միացեք U, V և W տերմինալներին, ինչպես ցույց է տրված: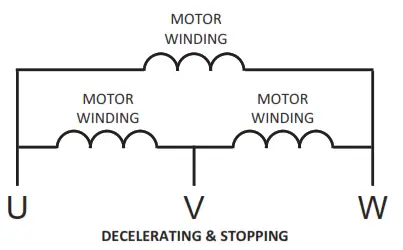
Դանդաղեցրեք մինչև նվազագույն կամ զրոյական արագություն
Ստորև ներկայացված անջատիչը կարող է օգտագործվել շարժիչի նվազագույն արագությունը դանդաղեցնելու համար: S3-ի և պոտենցիոմետրի միջև անջատիչը բացելը դանդաղեցնում է շարժիչը սահմանված արագությունից մինչև նվազագույն արագությունը, որը որոշվում է MIN SPEED-ի կտրվածքի կարգավորմամբ: Եթե MIN SPEED դեկորատիվ զամբյուղը միացված է լրիվ CCW, շարժիչը դանդաղեցնում է մինչև զրոյական արագությունը, երբ անջատիչը բացվում է: DECEL TIME դրվագման զամբյուղի կարգավորումը որոշում է շարժիչի դանդաղեցման արագությունը: Անջատիչը փակելով՝ շարժիչը արագացնում է արագությունը սահմանելու այն արագությամբ, որը որոշվում է ACCEL TIME կտրվածքի կաթսայով: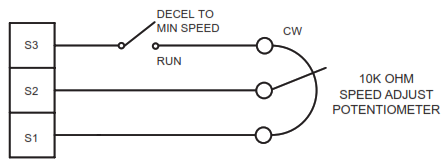
Կալիբրացիա
Նվազագույն արագություն (P1). MIN SPEED պարամետրը որոշում է շարժիչի նվազագույն արագությունը, երբ արագության ճշգրտման պոտենցիոմետրը կամ անալոգային ազդանշանը սահմանված է նվազագույն արագության համար (լրիվ CCW): Գործարանային դրված է զրոյական արագության համար։ MIN SPEED-ը չափորոշելու համար՝
- Կարգավորեք MIN SPEED դրվագը լրիվ CCW:
- Սահմանեք արագության ճշգրտման պոտենցիոմետրը կամ անալոգային ազդանշանը նվազագույն արագության համար:
- Կարգավորեք MIN SPEED կտրվածքի կաթսան այնքան ժամանակ, մինչև հասնի ցանկալի նվազագույն արագությունը կամ լինի հենց պտտման շեմին:
Առավելագույն արագություն (P2)MAX SPEED պարամետրը որոշում է շարժիչի առավելագույն արագությունը, երբ արագության ճշգրտման պոտենիոմետրը կամ անալոգային ազդանշանը սահմանված է առավելագույն արագության համար: Այն գործարանային կարգավորված է շարժիչի առավելագույն գնահատված արագության համար: MAX SPEED-ը չափորոշելու համար՝
- Կարգավորեք MAX SPEED դրվագը լրիվ CCW:
- Սահմանեք արագության ճշգրտման պոտենցիոմետրը կամ անալոգային ազդանշանը առավելագույն արագության համար:
- Կարգավորեք MAX SPEED դրվագը մինչև ցանկալի առավելագույն արագության հասնելը:
Ստուգեք MIN SPEED-ի և MAX SPEED-ի կարգավորումները, որոնք վերահաշվառվում են՝ ստուգելու համար, որ շարժիչն աշխատում է ցանկալի նվազագույն և առավելագույն արագություններով:
Արագացում (P3): ACCEL TIME պարամետրը որոշում է, թե որքան ժամանակ է պահանջվում շարժիչը մինչև ramp դեպի ավելի բարձր արագություն՝ անկախ ուղղությունից: ACCEL TIME-ը չափորոշելու համար պտտեք ACCEL TIME կտրվածքի զամբյուղը CW՝ առաջ արագացման ժամանակը մեծացնելու համար, իսկ CCW՝ առաջ արագացման ժամանակը նվազեցնելու համար:
Դանդաղեցում (P4): DECEL TIME պարամետրը որոշում է, թե որքան ժամանակ է պահանջվում շարժիչը մինչև ramp ավելի ցածր արագության, երբ հրամայվում է պոտենցիոմետրի կամ անալոգային ազդանշանի կողմից, անկախ ուղղությունից: DECEL TIME-ը չափորոշելու համար պտտեցրեք DECEL TIME-ի կտրվածքի զամբյուղը CW՝ դանդաղեցման ժամանակը մեծացնելու համար:
Սայթաքման փոխհատուցում (P5). SLIP COMP պարամետրը որոշում է այն աստիճանը, որով շարժիչի արագությունը մնում է անփոփոխ, երբ փոխվում է շարժիչի բեռը: SLIP COMP-ը չափորոշելու համար՝
- Կարգավորեք SLIP COMP զամբյուղը լրիվ CCW:
- Բարձրացրեք արագության ճշգրտման պոտենցիոմետրը, մինչև շարժիչը աշխատի միջին արագությամբ առանց բեռի: Շարժիչի արագությունը չափելու համար կարող է օգտագործվել 2. ձեռքի արագաչափ:
- Շարժիչը բեռնեք մինչև իր ամբողջ բեռնվածության ընթացիկ գնահատականը: Շարժիչը պետք է դանդաղի:
- Շարժիչի վրա բեռը պահելով, պտտեցրեք SLIP COMP զարդարման կաթսան մինչև շարժիչը աշխատի 4-ում: արագությունը, որը չափվում է 2-րդ քայլում: Եթե շարժիչը տատանվում է (գերփոխհատուցում), ապա SLIP COMP 4. պատվածքը կարող է չափազանց բարձր լինել (CW): Շարժիչը կայունացնելու համար պտտեցրեք SLIP COMP-ի CCW զամբյուղը:
- Բեռնաթափել շարժիչը:
Հատtage Boost (P6): ՀատորTAGE BOOST պարամետրը մեծացնում է շարժիչի ոլորող մոմենտը ցածր արագությամբ: Նվազագույն պարամետրը բավարար է հավելվածների մեծ մասի համար և կարիք չունի ճշգրտման: Եթե շարժիչը կանգ է առնում կամ անկանոն աշխատում է շատ ցածր արագությամբ (10 Հց-ից ցածր), ապա հնարավոր է, որ կարգավորիչի կարիք լինի շտկման սարքը:
VOL-ը չափորոշելու համարTAGE BOOST:
- Աշխատեք շարժիչը պահանջվող ամենացածր շարունակական արագությամբ/հաճախականությամբ:
- Բարձրացնել VOL-ըTAGE BOOST զարդարել կաթսան մինչև շարժիչը սահուն աշխատի: Շարժիչի ընթացիկ ցուցանիշից դուրս շարունակական աշխատանքը կարող է վնասել շարժիչը:
Ոլորող մոմենտ (P7): TQ LIMIT պարամետրը որոշում է շարժիչը արագացնելու և վարելու առավելագույն ոլորող մոմենտը:
TQ LIMIT-ը չափորոշելու համար:
- Շարժիչից անջատված հոսանքի դեպքում միացրեք RMS ամպաչափը մի շարք շարժիչի լարերից մեկի հետ:
- Անջատեք TQ LIMIT դրվագը լրիվ CW-ի: Կիրառեք հզորությունը և կարգավորեք շարժիչի արագությունը մինչև լրիվ անվանական արագությունը:
- Շարժիչը բեռնեք այնպես, որ այն քաշի նախկինում որոշված RMS հոսանքը:
- Դանդաղ պտտեցրեք TQ LIMIT CCW զամբյուղը, մինչև կարմիր LED-ը սկսի թարթել: Այնուհետև մի փոքր ավելի պտտեք զամբյուղը, որպեսզի այն սկսի նվազեցնել շարժիչը amps RMS ամպաչափի վրա:
Արգելակի ծավալtage (P8): Արգելակի հատtagե-ն որոշում է հատtage մակարդակը, որով շարժիչը հոսանք կկիրառի DC ներարկման արգելակման համար: Որքան բարձր է ծավալըtagե, այնքան ավելի հոսանք կլինի շարժիչը: DC ներարկման արգելակումը տեղի կունենա միայն Արգելակման ռեժիմում (ընկղմման անջատիչ 3 = ON):
Արգելակի դադար (P9): Արգելակման ԺԱՄԿԵՏԸ որոշում է, թե արգելակելիս որքան ժամանակ կկիրառվի DC ներարկման արգելակման հոսանքը: DC ներարկման արգելակումը տեղի կունենա միայն Արգելակման ռեժիմում (Դիփ անջատիչ 3 = ON): ![]()
Փաստաթղթեր / ռեսուրսներ
 |
Minarik MDVF03 բաց շասսի միկրոպրոցեսորի վրա հիմնված փոփոխական հաճախականության շարժիչ [pdf] Սեփականատիրոջ ձեռնարկ MDVF03 բաց շասսի միկրոպրոցեսորի վրա հիմնված փոփոխական հաճախականության շարժիչ, MDVF03, բաց շասսի միկրոպրոցեսորի վրա հիմնված փոփոխական հաճախականության շարժիչ, միկրոպրոցեսորի վրա հիմնված փոփոխական հաճախականության շարժիչ, փոփոխական հաճախականության շարժիչ, հաճախականության շարժիչ, սկավառակ |



